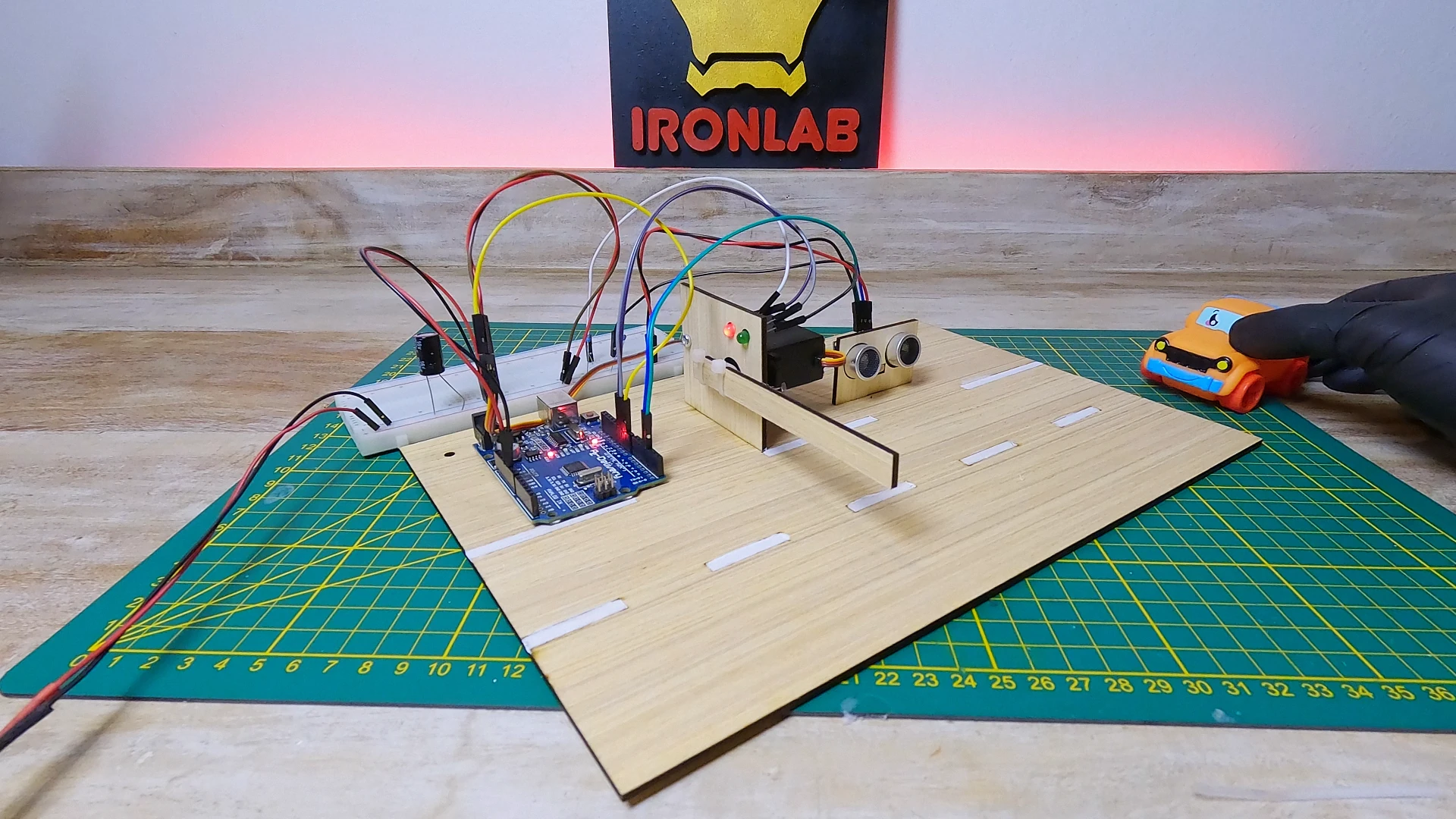
Ce projet Arduino te permet de créer un système de barrière automatique à l’aide d’une Arduino Uno, d’un servomoteur et d’un module à ultrasons HC-SR04. Pour le rendre plus réaliste, des LEDs sont utilisées afin de fournir un signal visuel.
Amuse-toi bien en reproduisant ce projet !
Matériel nécessaire
- Arduino Uno
- Alimentation externe 5V (2-3A)
- Servomoteur MG996R
- Capteur ultrason HR-SC04
- Breadboard
- LED rouge
- LED verte
- Résistance 470 Ω
- Câbles Male/Male
- Câbles Male/Femelle
- Maquette découpé en contreplaqué (3mm) ou en carton (schémas dans le dossier Schéma).
- Vis diamètre 3mm longeur 16mm x2
- Ecrou diamètre 3mm x2
- (Optionnel) Condensateur 1000 µF (pour stabiliser l’alimentation du servo)
Schéma de câblage
| Composant | Arduino |
|---|---|
| HC-SR04 VCC | 5V |
| HC-SR04 Echo | D3 |
| HC-SR04 Trig | D4 |
| HC-SR04 GND | GND |
| Signal Servo | D9 |
| Led verte | D10 |
| Led rouge | D10 |
| VCC Servo | 5V |
| GND Servo | GND |
| Alimentation 5V | 5V (commun) |
| Alimentation GND | GND (commun) |
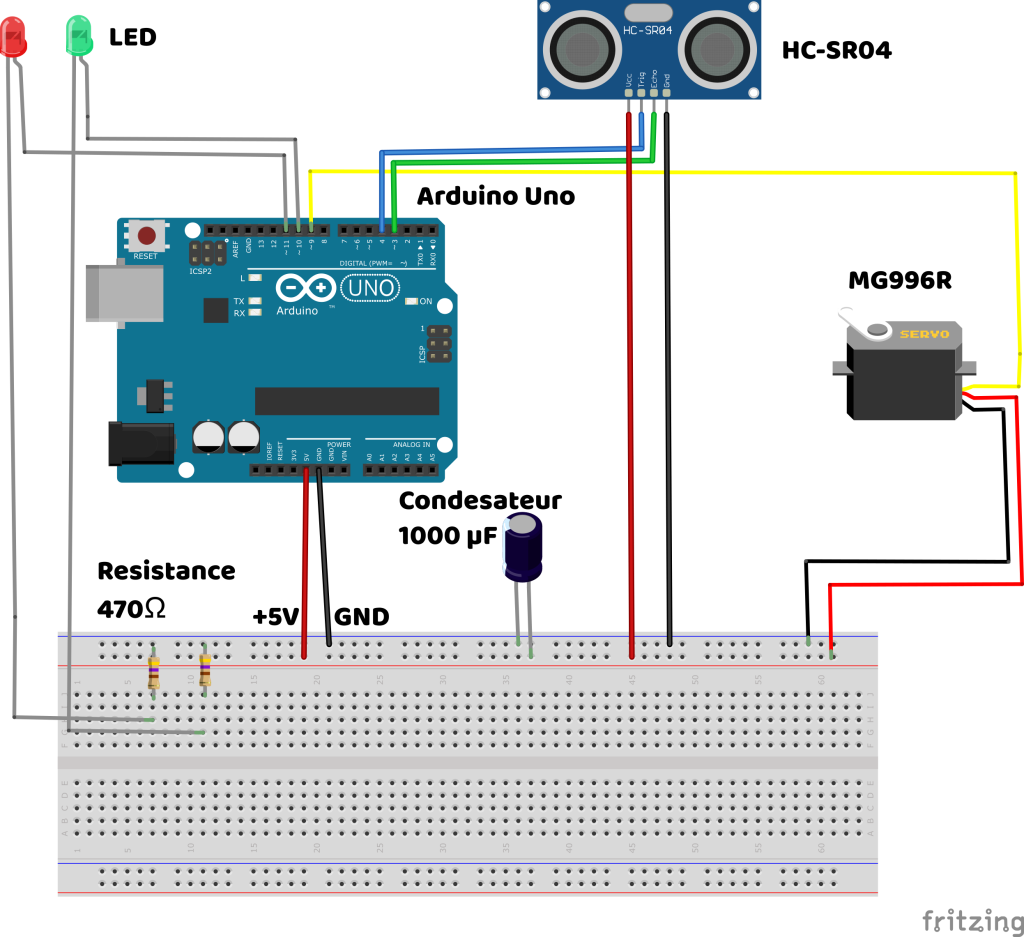
⚠️ Le MG996R peut consommer jusqu’à 2.5 A : ne pas l’alimenter directement depuis l’Arduino. Utilise une alimentation externe 5V bien régulée, et connecte sa masse à celle de l’Arduino.
Fonctionnement
- Le capteur à ultrasons détecte la présence d’un véhicule.
- La barrière s’ouvre.
- Le feu rouge s’éteint.
- Le feu vert s’allume.
Code Arduino
#include <Servo.h>
// Déclaration du servo
Servo barriereServo;
// Définition des pins
const int trigPin = 4; // Pin Trigger du HC-SR04
const int echoPin = 3; // Pin Echo du HC-SR04
const int ledRouge = 11; // LED rouge
const int ledVerte = 10; // LED verte
const int servoPin = 9; // Servo moteur MG996R
// Distance minimale pour détecter un obstacle (ici 5 cm)
const int distanceSeuil = 5;
void setup() {
Serial.begin(9600); // Initialisation de la communication série
pinMode(trigPin, OUTPUT); // Trigger en sortie
pinMode(echoPin, INPUT); // Echo en entrée
pinMode(ledRouge, OUTPUT); // LED rouge en sortie
pinMode(ledVerte, OUTPUT); // LED verte en sortie
barriereServo.attach(servoPin); // Attacher le servo au pin défini
barriereServo.write(90); // Barrière initialement fermée (position 90°)
}
void loop() {
// Envoi de l'impulsion sur le trigger
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Lecture de la durée de l'impulsion Echo
long duree = pulseIn(echoPin, HIGH);
// Conversion du temps en distance (cm)
int distance = duree * 0.034 / 2;
Serial.print("Distance : ");
Serial.print(distance);
Serial.println(" cm");
if (distance <= distanceSeuil) {
// Objet détecté à proximité
digitalWrite(ledRouge, LOW); // Éteindre la LED rouge
digitalWrite(ledVerte, HIGH); // Allumer la LED verte
barriereServo.write(90); // Ouvrir la barrière (0°)
delay(2000); // On attend 2 secondes
} else {
// Pas d'objet détecté
digitalWrite(ledRouge, HIGH); // Allumer la LED rouge
digitalWrite(ledVerte, LOW); // Éteindre la LED verte
barriereServo.write(0); // Fermer la barrière (90°)
}
delay(200); // Délai pour éviter les déclenchements trop fréquents
}
Assemblage
Les fichiers de découpe laser nécessaire à la réalisation de la maquette sont disponible sur mon GitHub :
https://github.com/ironlab974/Electr04-Barriere-Automatique
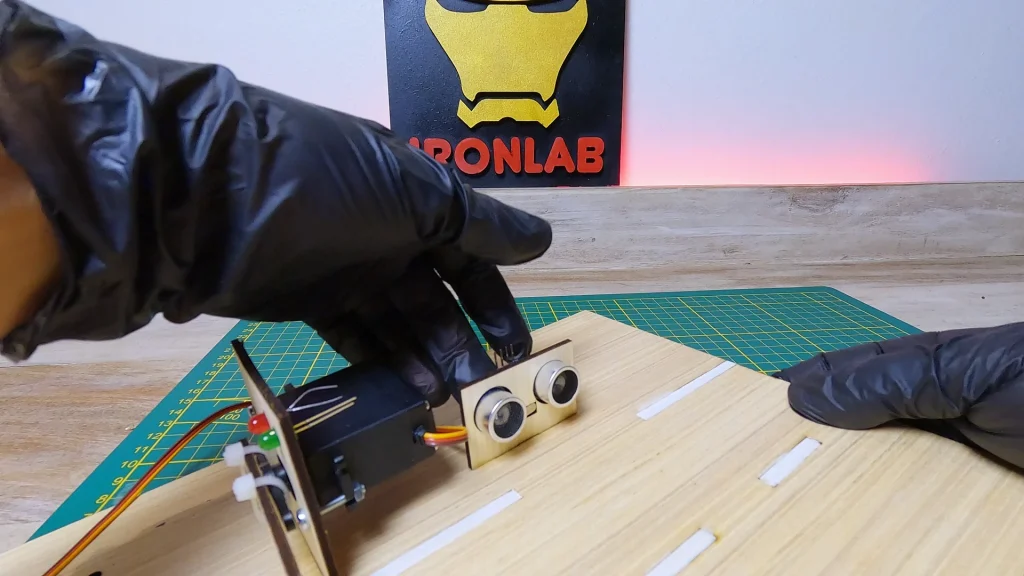
Colle le support du module HC-SR04 sur la maquette.

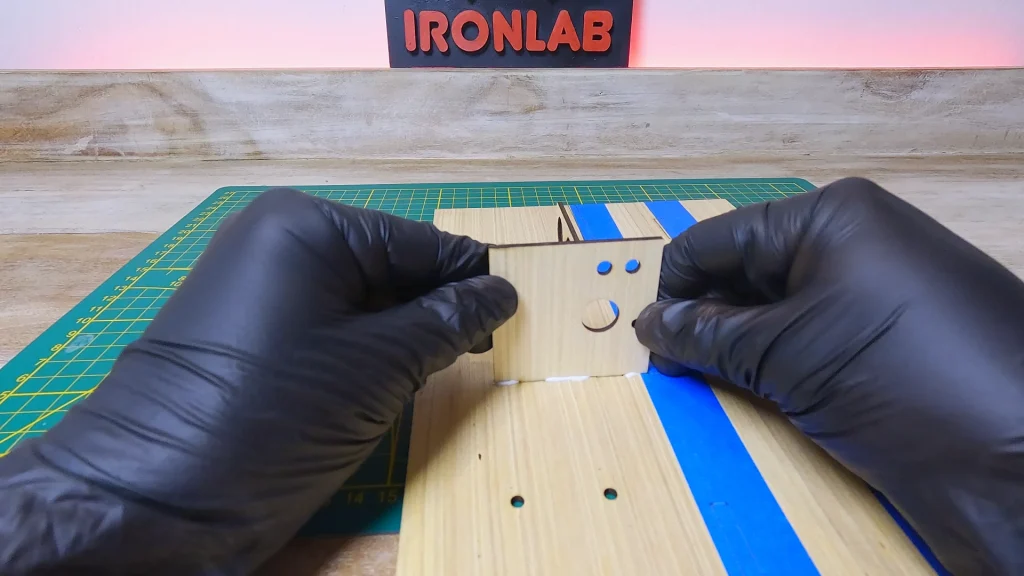
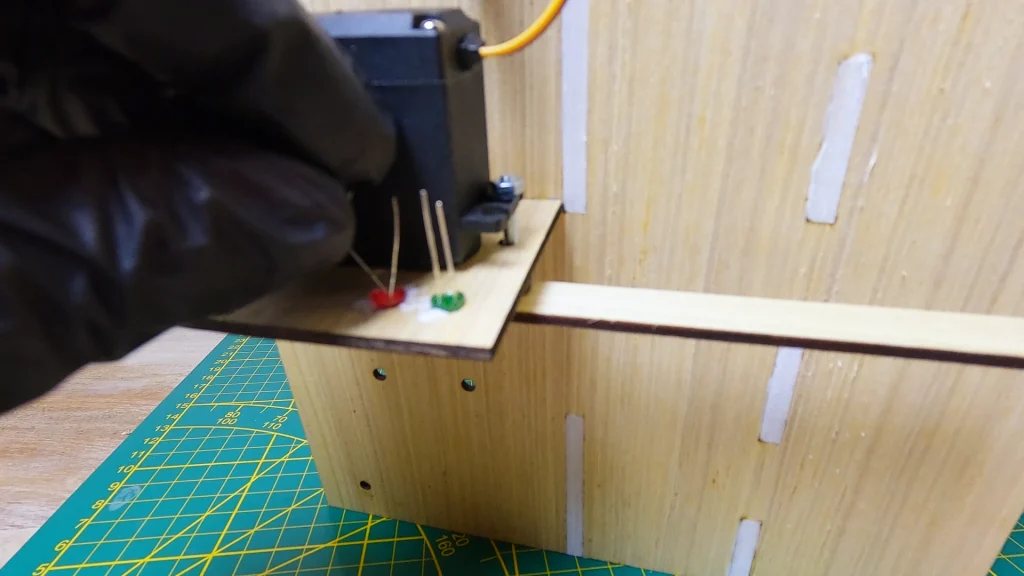
Colle le support du servomoteur et des LED sur la maquette. ⚠️ Attention : le trou des LED doit se trouver à droite.
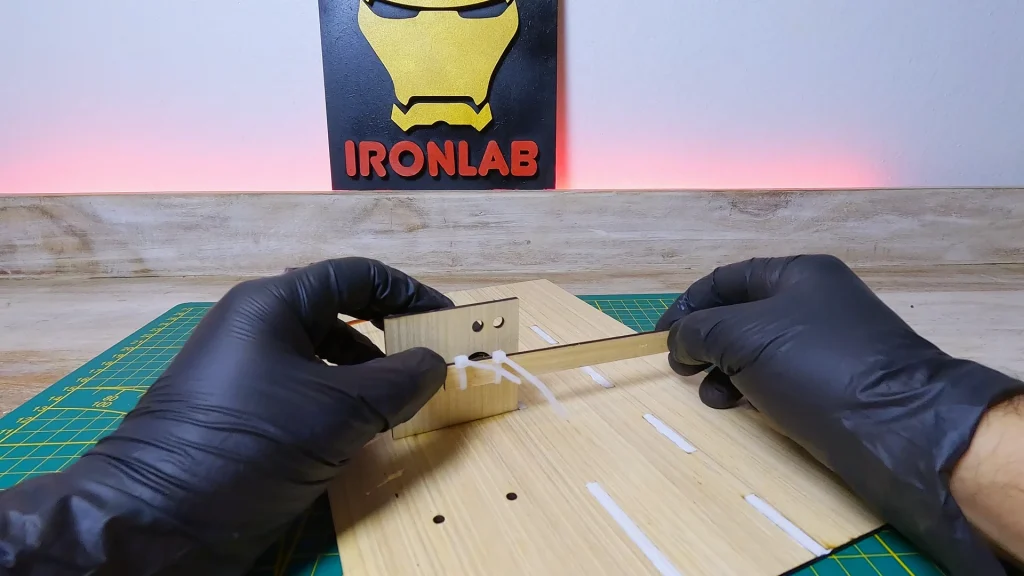
Installe le servomoteur sur son support à l’aide des deux vis M3 de 16 mm et des écrous.

Fixe la barrière au servomoteur à l’aide des rislans.
Colle les LEDs au support. La LED verte se trouve à droite.
Colle le module HC-SR04 au support.
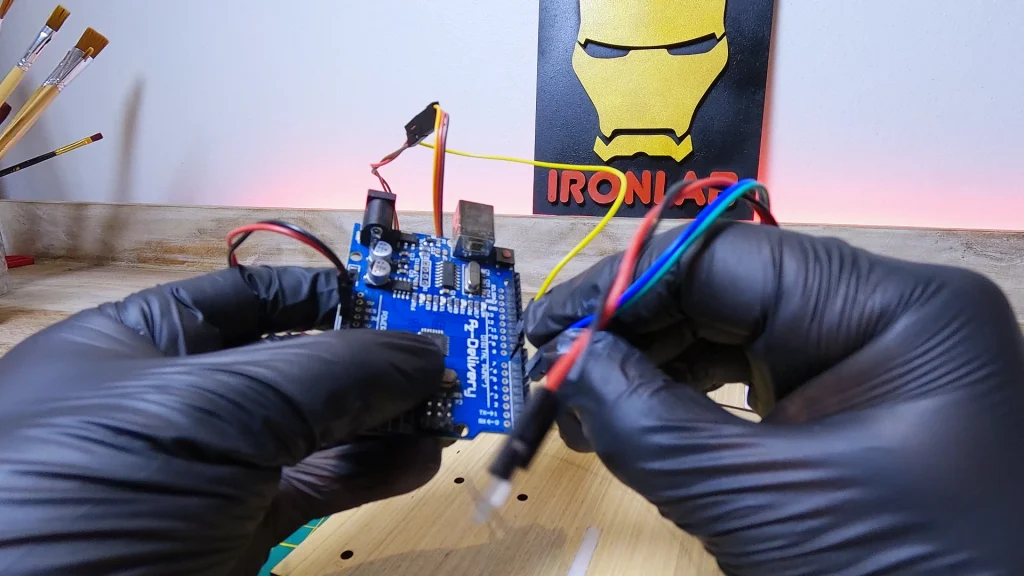
Réalise les branchements en suivant le schéma.
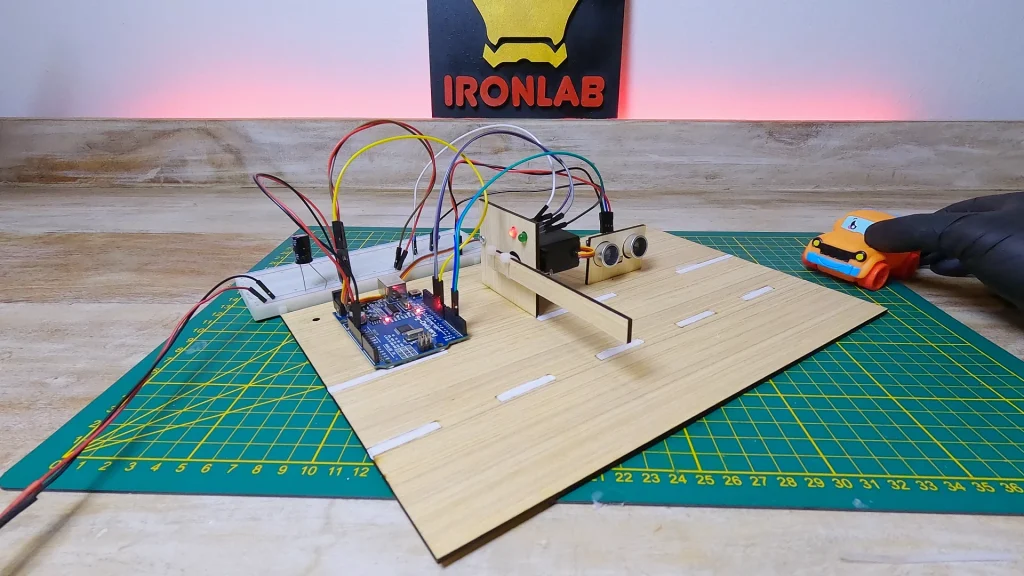
Upload le code, ajoute l’alimentation 5V et test ta création !
La vidéo du montage
Le petit mot de la fin
J’espère que le projet t’a plu et que tu t’es amusé ! Si ce type de projet t’intéresse, n’hésite pas à liker et partager un maximum sur les réseaux. Tu peux aussi laisser un commentaire si tu as réussi à le reproduire !
Nos projets
IronLab — Passionné d’électronique, robotique & projets DIY
AquaLab — La téchnologie au service du monde marin & chasse au trésor.
Leave a Reply