Ce projet Arduino te permet de contrôler un servomoteur (MG996R) en temps réel avec un potentiomètre 10kΩ. Tourner le potentiomètre fera pivoter le servomoteur selon l’angle correspondant.
🛠 Matériel nécessaire
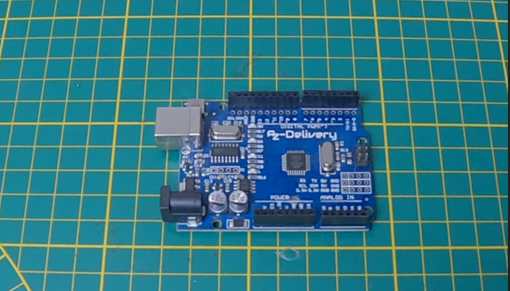
- Arduino Uno
- Alimentation externe 5V (2-3A)
- Servomoteur MG996R
- Potentiomètre 10kΩ
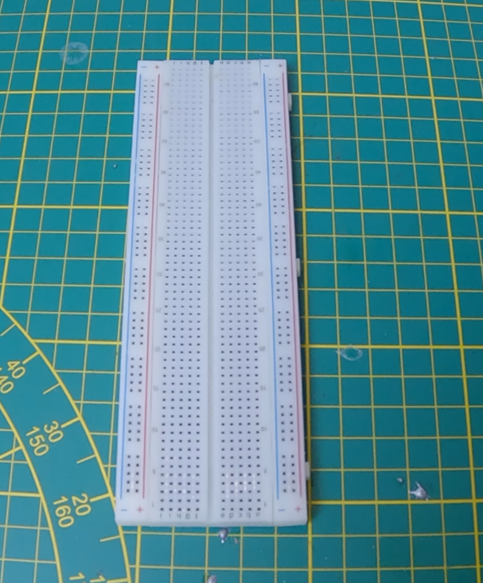
- Breadboard
- Câbles Male (8 pour le montage)
- (Optionnel) Condensateur 1000 µF (pour stabiliser l’alimentation du servo)
- (Optionnel) Compas découpé au laser en carton ou en bois.
- (Optionnel) Flèche découpé au laser en carton ou en bois.
- (Optionnel) Vis diamètre 3mm longeur 15mm x2
- (Optionnel) Ecrou diamètre 3mm x2
🔌 Schéma de câblage
| Composant | Arduino |
|---|---|
| Potentiomètre OUT | A0 |
| Potentiomètre VCC | 5V |
| Potentiomètre GND | GND |
| Signal Servo | D9 |
| VCC Servo | 5V (externe) |
| GND Servo | GND commun |
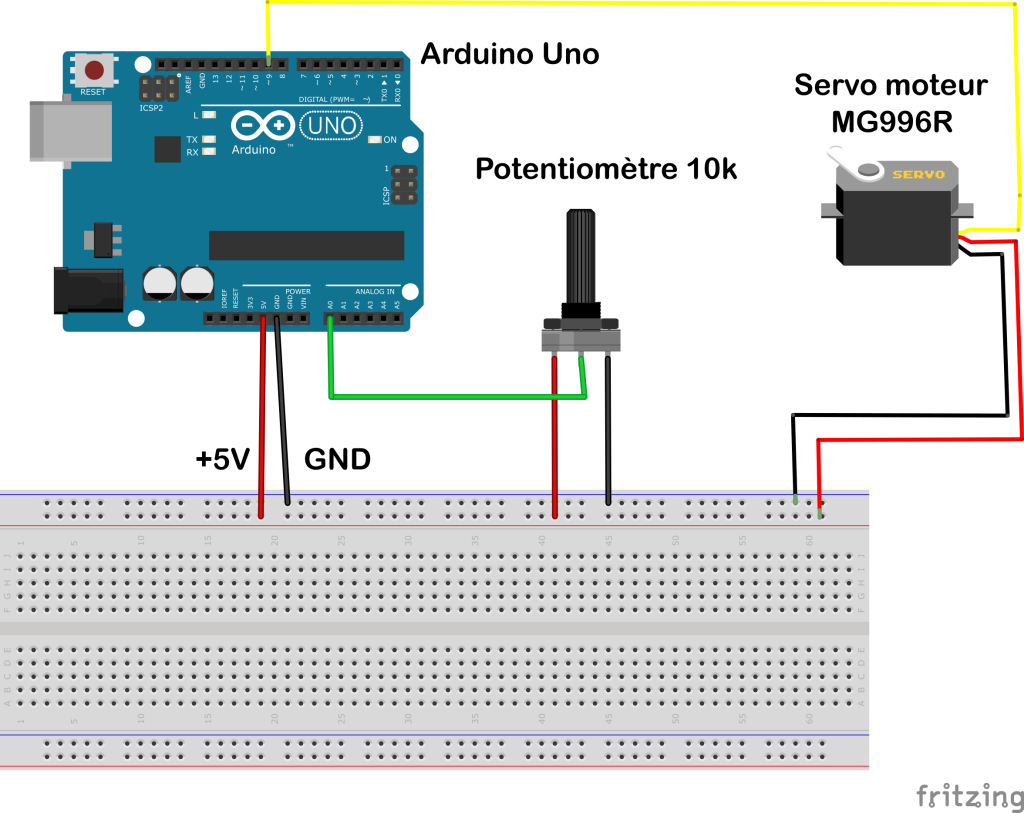
⚠️ Le MG996R peut consommer jusqu’à 2.5 A : ne pas l’alimenter directement depuis l’Arduino. Utilise une alimentation externe 5V bien régulée, et connecte sa masse à celle de l’Arduino.
🧠 Fonctionnement
- Le potentiomètre agit comme un diviseur de tension. La lecture analogique (0–1023) est convertie en un angle (0–180°).
- Le servo reçoit cet angle et ajuste sa position en conséquence.
- Un condensateur en parallèle sur l’alimentation du servo permet d’éviter les chutes de tension lors des pics de courant.
💾 Code Arduino
#include <Servo.h>
Servo myServo; // Création de l'objet servo
const int potPin = 0; // Broche du potentiomètre
int potValue = 0; // Valeur analogique lue
int angle = 0; // Position convertie
void setup() {
myServo.attach(9); // Branchement du servo sur la broche D9
}
void loop() {
potValue = analogRead(potPin); // Lecture de la valeur du potentiomètre
angle = map(potValue, 0, 1023, 0, 180); // Conversion en angle pour le servo
myServo.write(angle); // Déplacement du servo à l'angle donné
delay(15); // Pause pour laisser le temps au servo de bouger
}
📷 Illustrations et assemblage
Potentiomètre 10kΩ
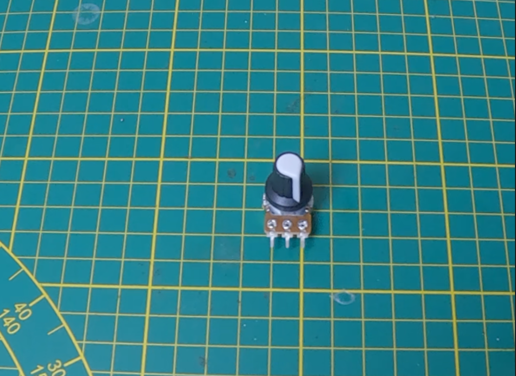
Le pin de gauche +5v pin du milieu = donnée et pin de droite GND.
Servo moteur MG996R
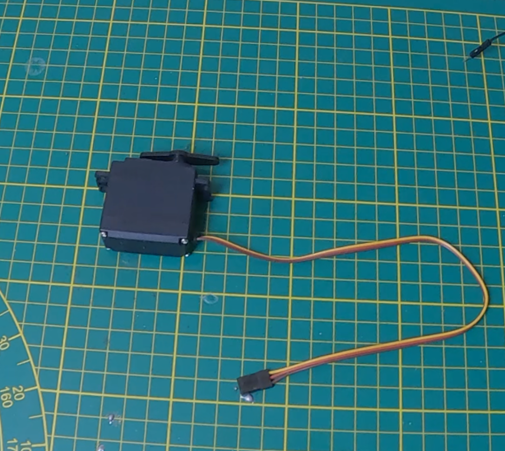
Il est important d’utiliser une alimentation externe de 5V entre 1-3A.
Compas, vis et écrou
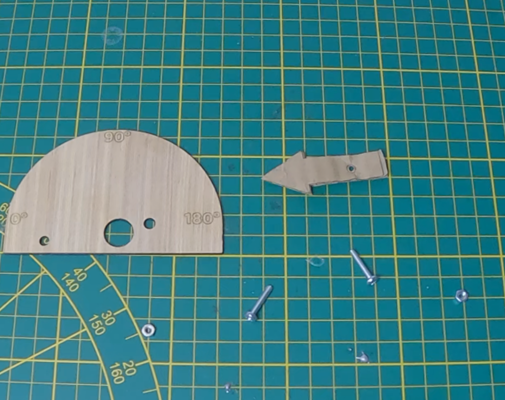
Le compas a été découpé dans du contreplaqué de 3 mm à l’aide d’une découpeuse laser.
Si vous n’avez pas accès à une découpeuse laser, vous pouvez le réaliser en carton en imprimant d’abord le modèle sur du papier.
Le modèle se trouve dans le dossier Schéma > compas.svg.
Pour la flèche, j’ai utilisé du carton découpé au laser, car le contreplaqué de 3 mm est trop épais pour fixer correctement la vis de l’attache du servomoteur.
Vous pouvez également la faire en carton, en imprimant d’abord le gabarit sur papier.
Les vis et écrous utilisés sont deux vis de diamètre 3 mm et de longueur 15 mm.
Les écrous sont également au pas de 3 mm, correspondant aux vis.
Arduino Uno
Breadboard
Alimentation 5V 3A

Dans ce projet, j’utilise une alimentation externe 5V 3A que j’ai modifiée dans une vidéo précédente.
Elle est connectée à la breadboard via les lignes +5V et GND, ce qui permet d’alimenter l’ensemble des composants du montage, y compris l’Arduino Uno.
Condensateur 1000 µF
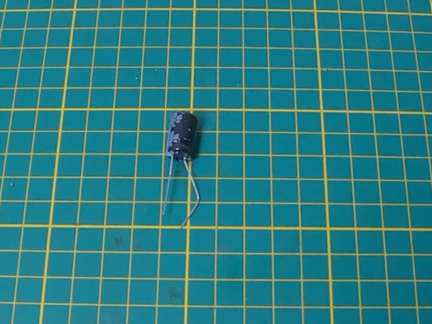
Le condensateur est optionnel mais si vous en avez à porté de main vous pouvez le branché directement sur la breadboard sur le +5v et GND comme sur le montage final.
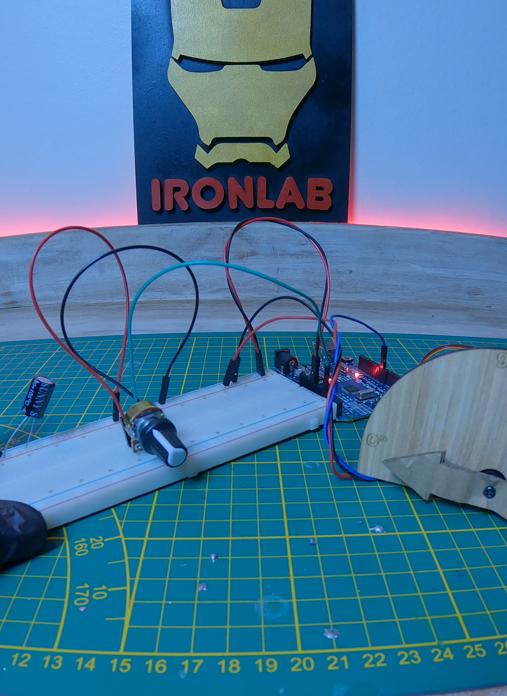
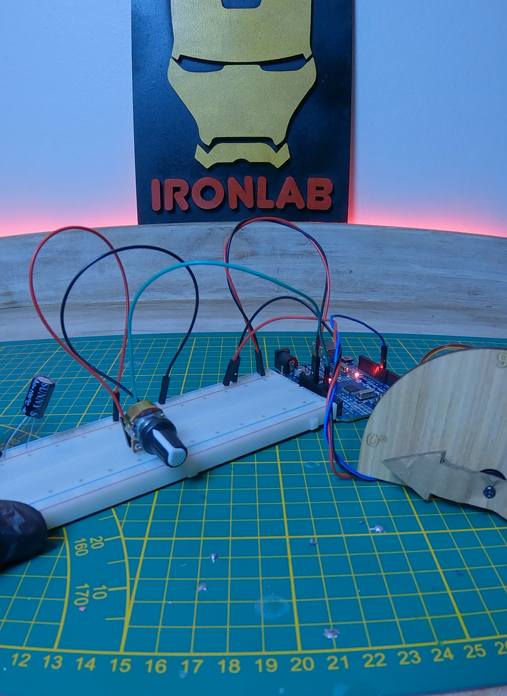
Montage final
📌 Astuce
💡 Ajoute un condensateur de 1000 µF entre le +5V et GND de l’alimentation du servo pour éviter les variations de tension qui peuvent provoquer des mouvements imprévus ou des resets d’Arduino.
✍️ Nos projets
IronLab — Passionné d’électronique, robotique & projets DIY
AquaLab — La téchnologie au service du monde marin & chasse au trésor.
🔗 Ressources utiles
📄 Licence
Ce projet est open-source, sous licence MIT.
N’hésitez pas à le modifier, le partager ou y contribuer.
Leave a Reply